Español
简体中文
English
Español
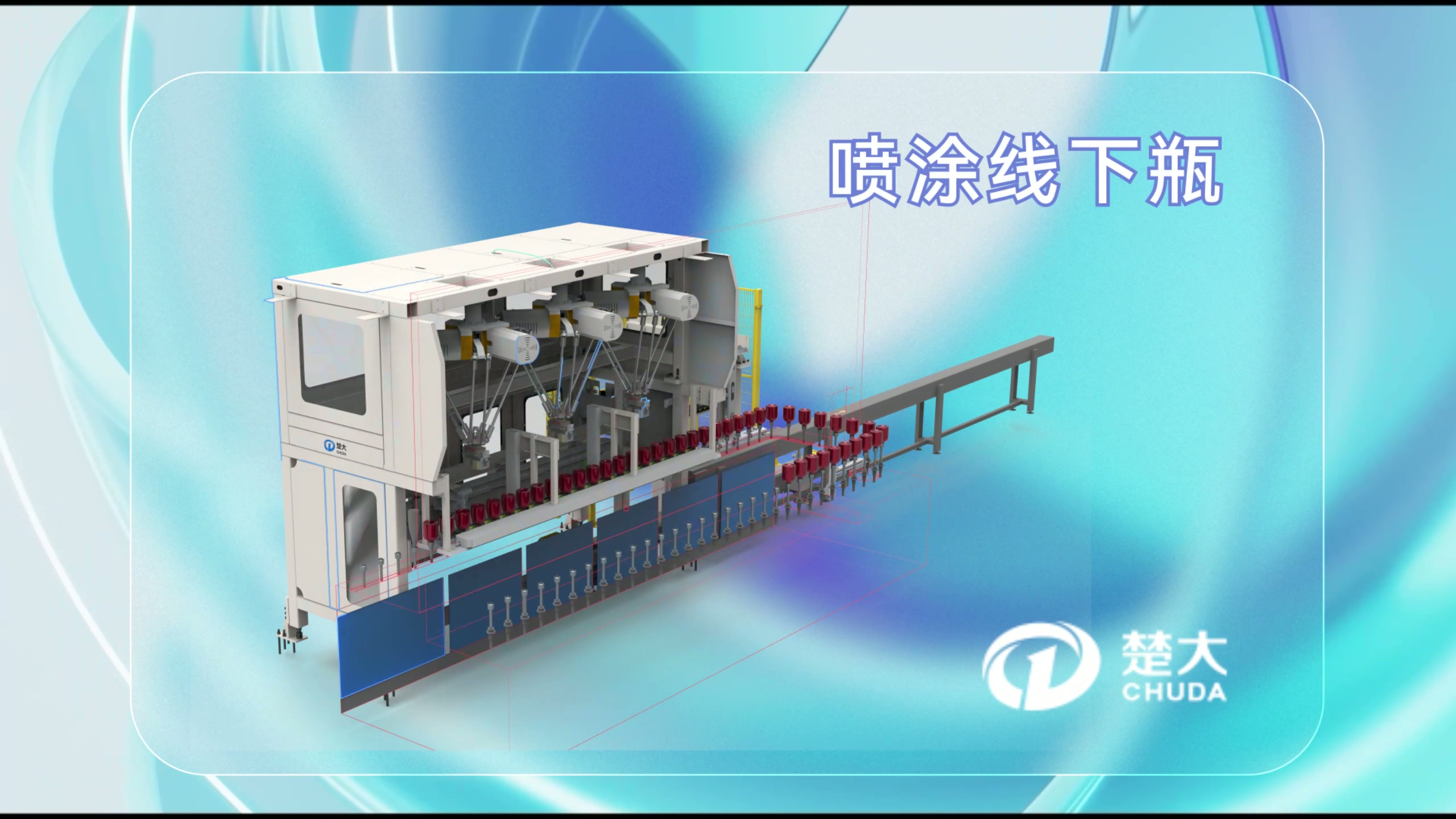
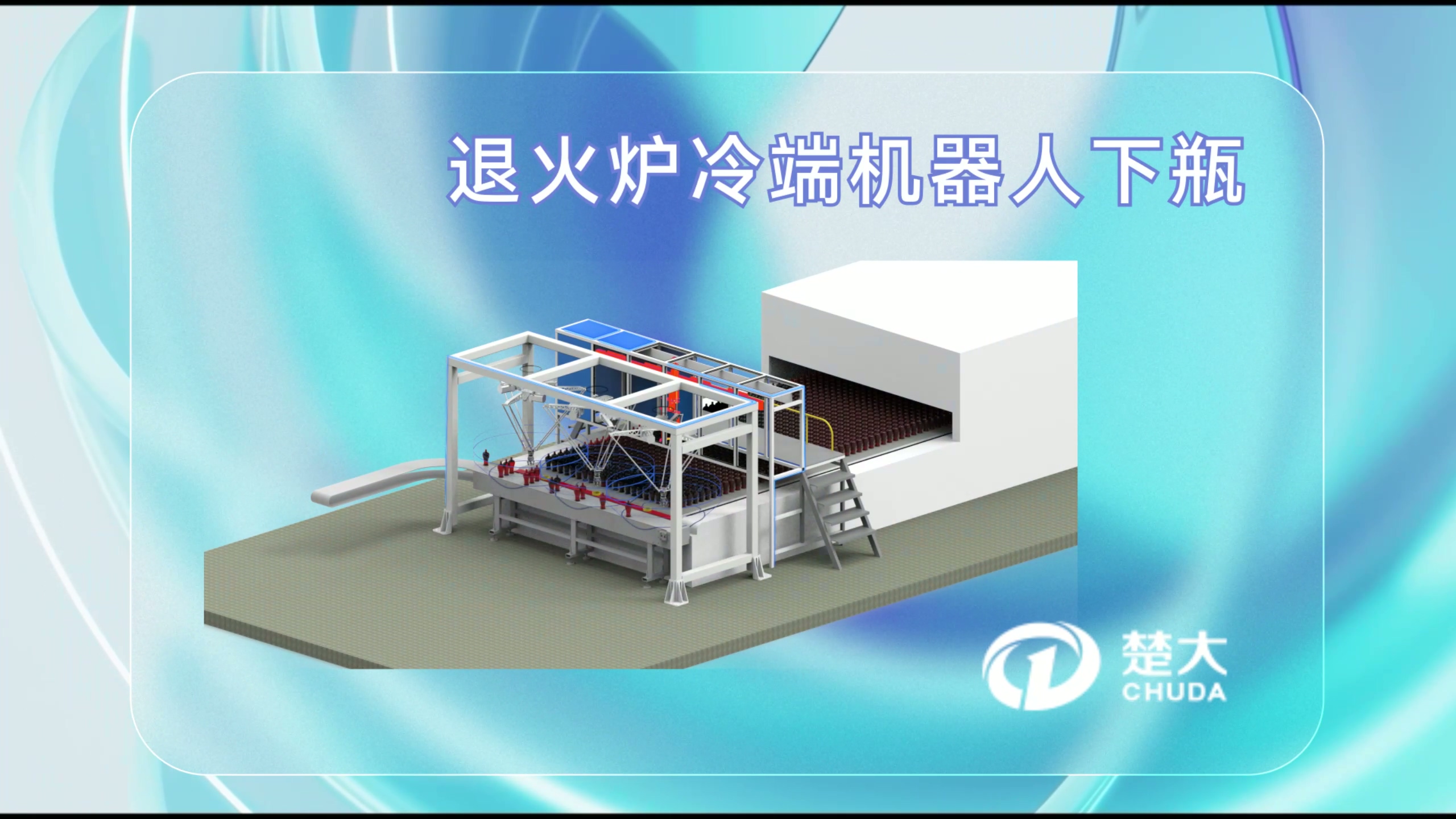
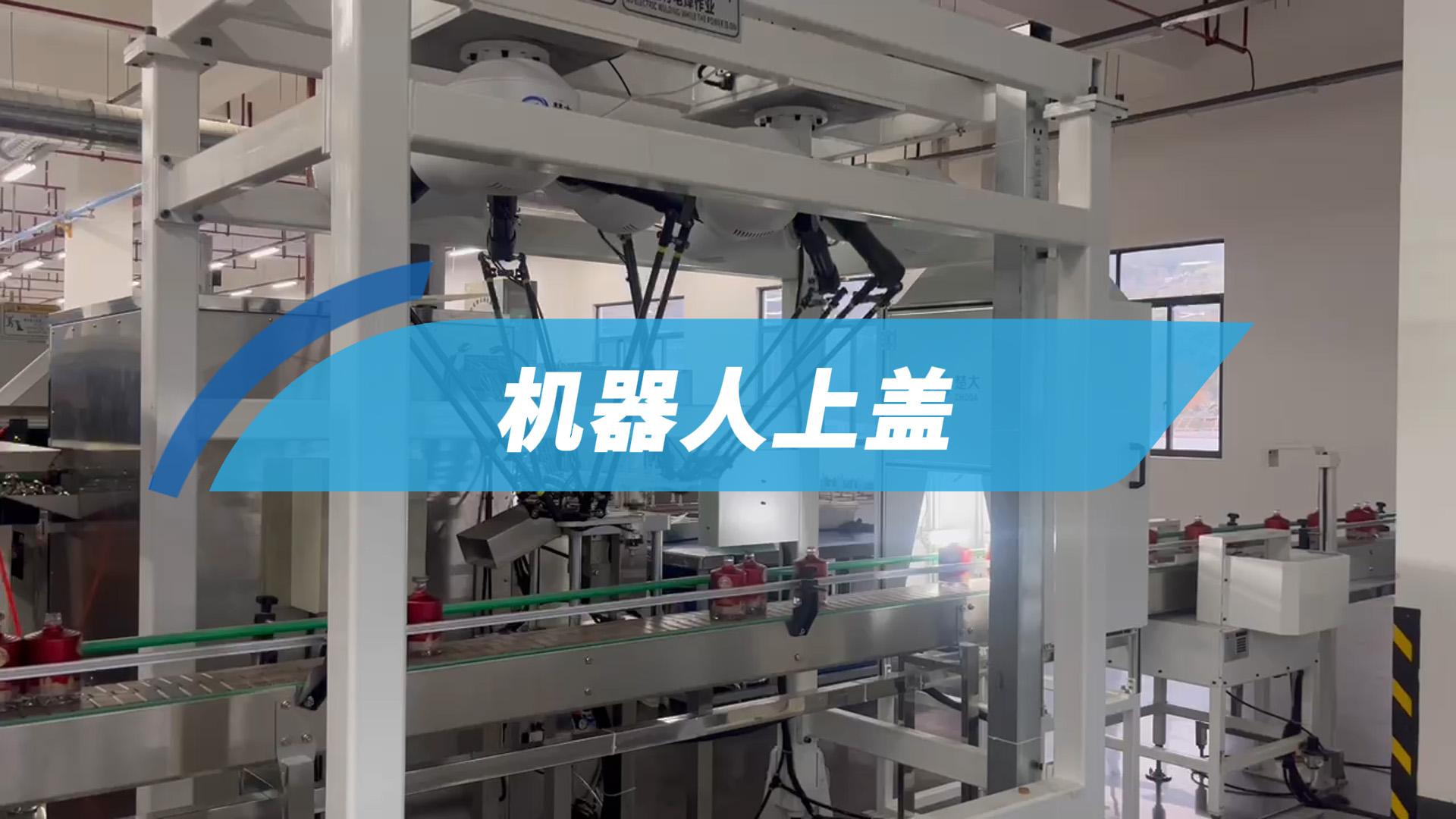
Logra un proceso automatizado completo de captura, transporte y transferencia de envases con tapas mediante un brazo robótico de pórtico de 3 ejes y un sistema neumático de pinzas múltiples. El movimiento de alta velocidad del pórtico triaxial combinado con la sujeción neumática, junto con el diseño flexible de las pinzas neumáticas que se adapta a múltiples tipos de botellas, garantiza la estabilidad de la captura.