Español
简体中文
English
Español
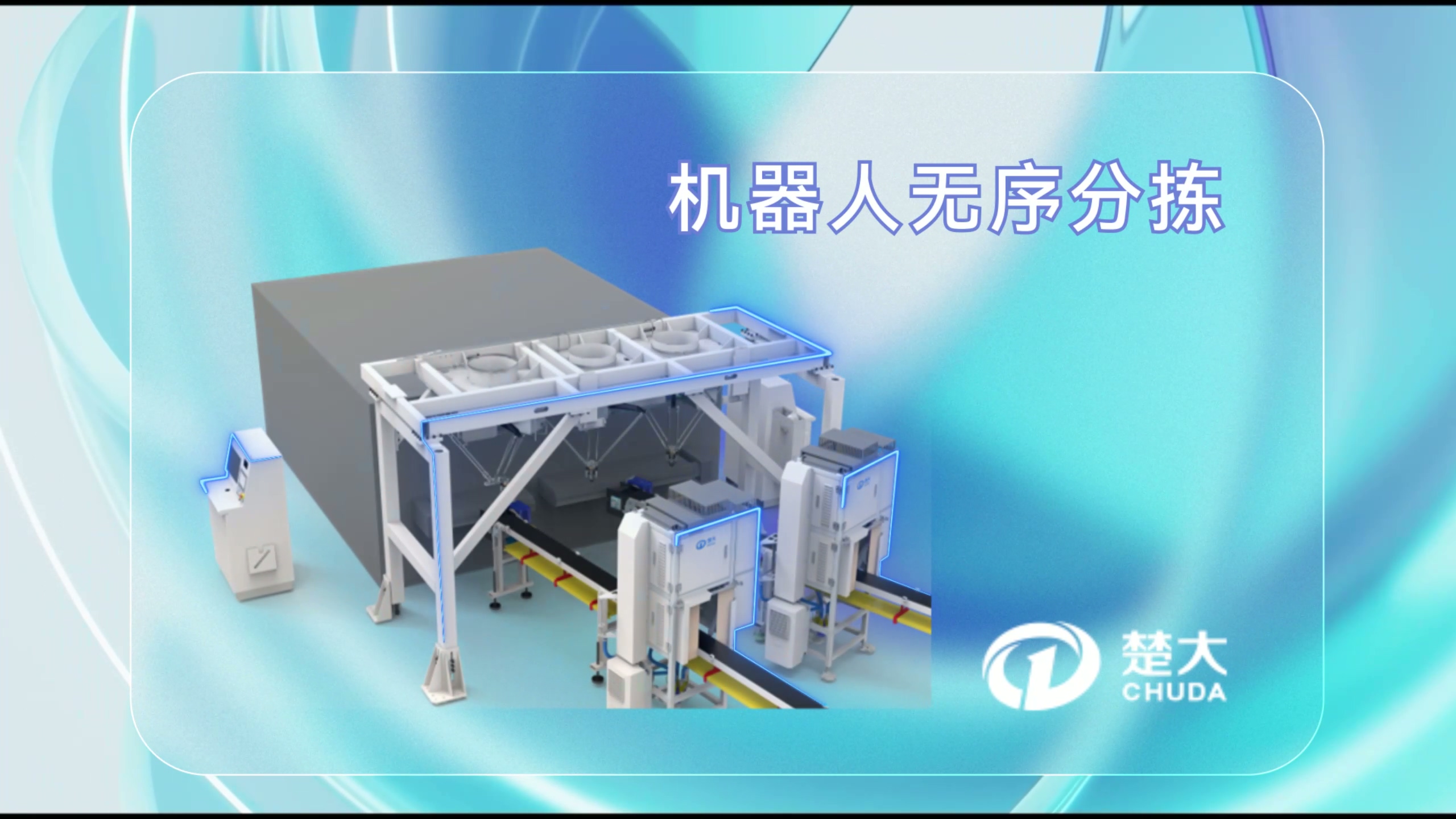
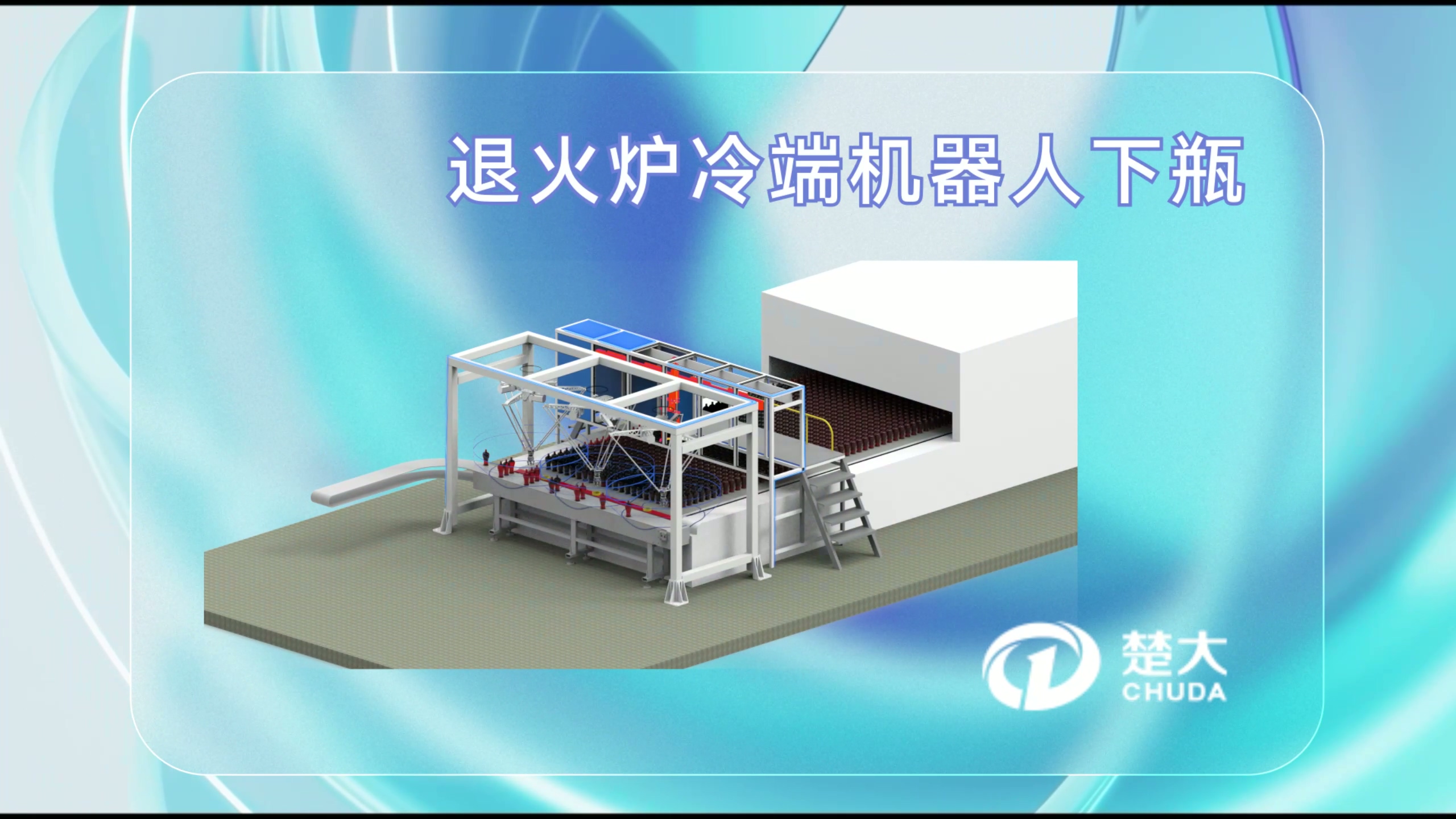
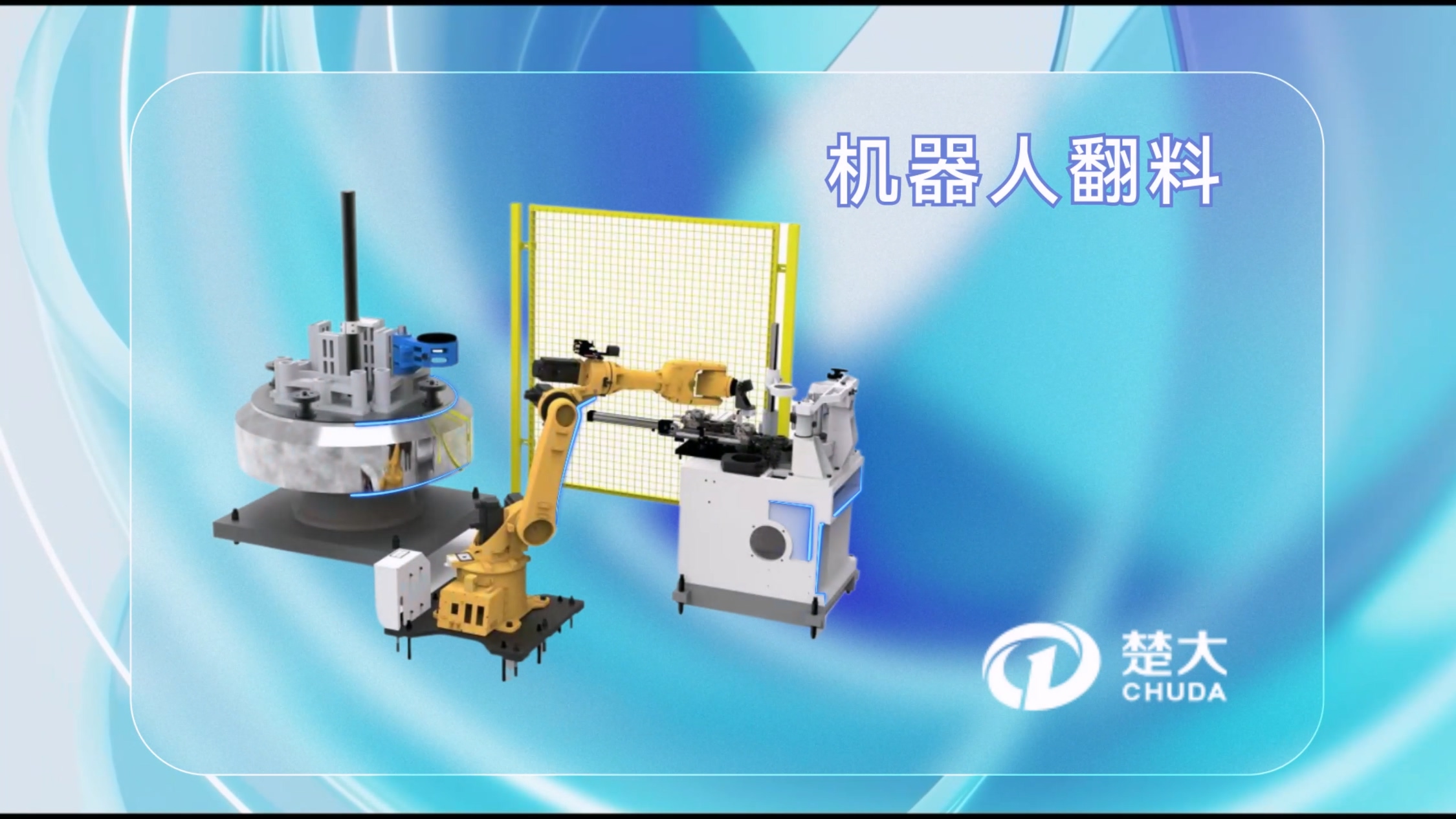
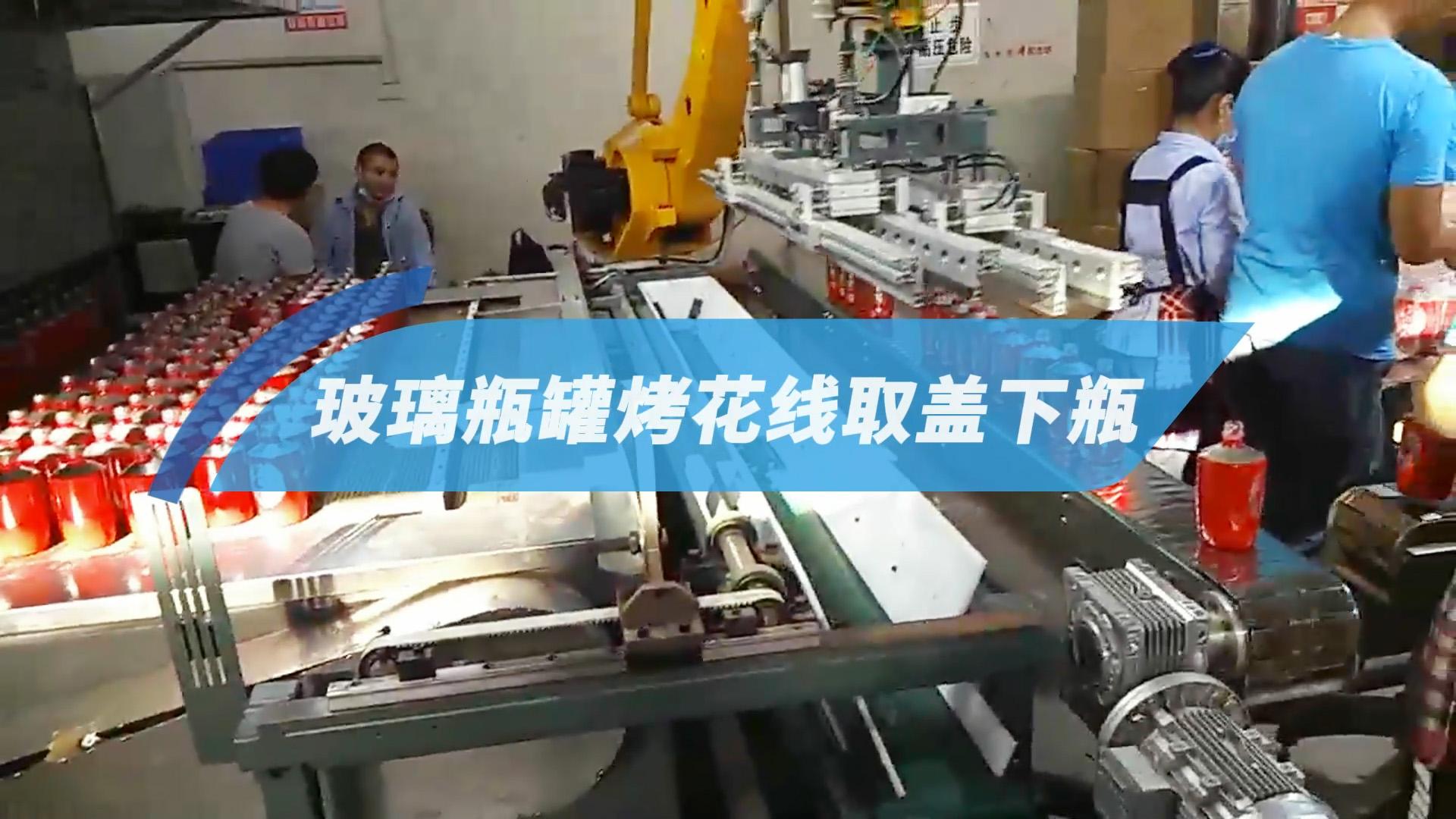
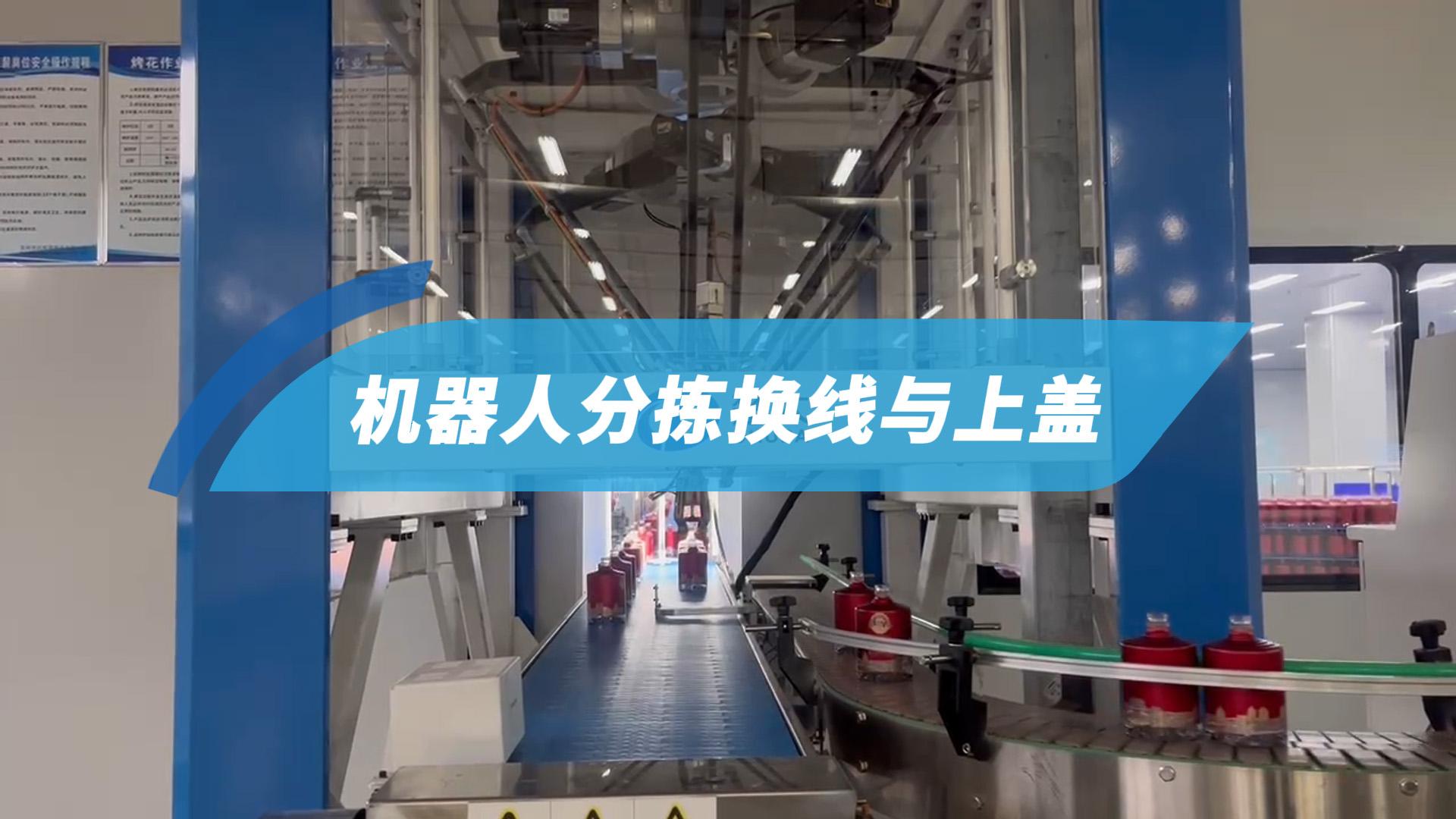
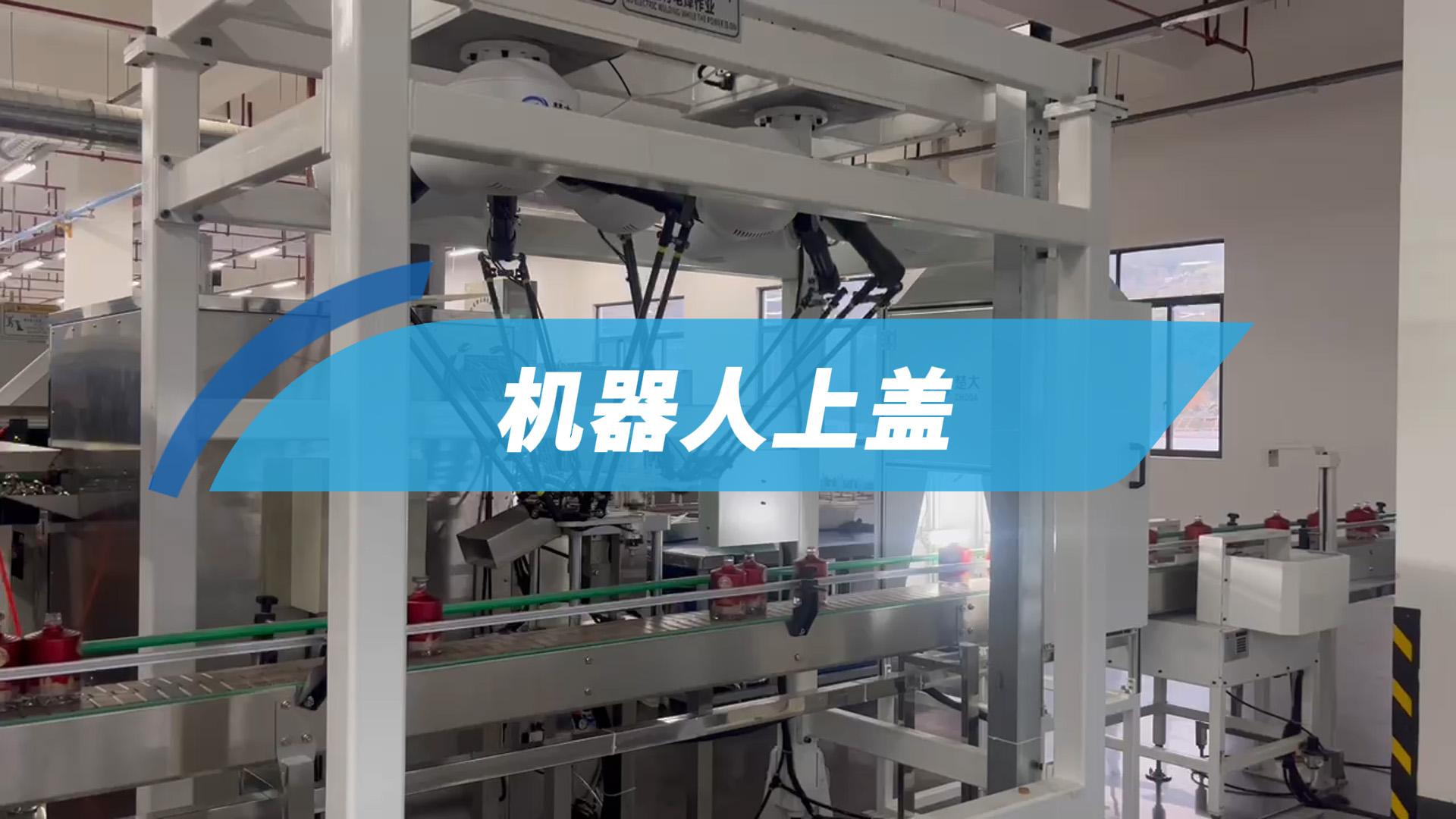
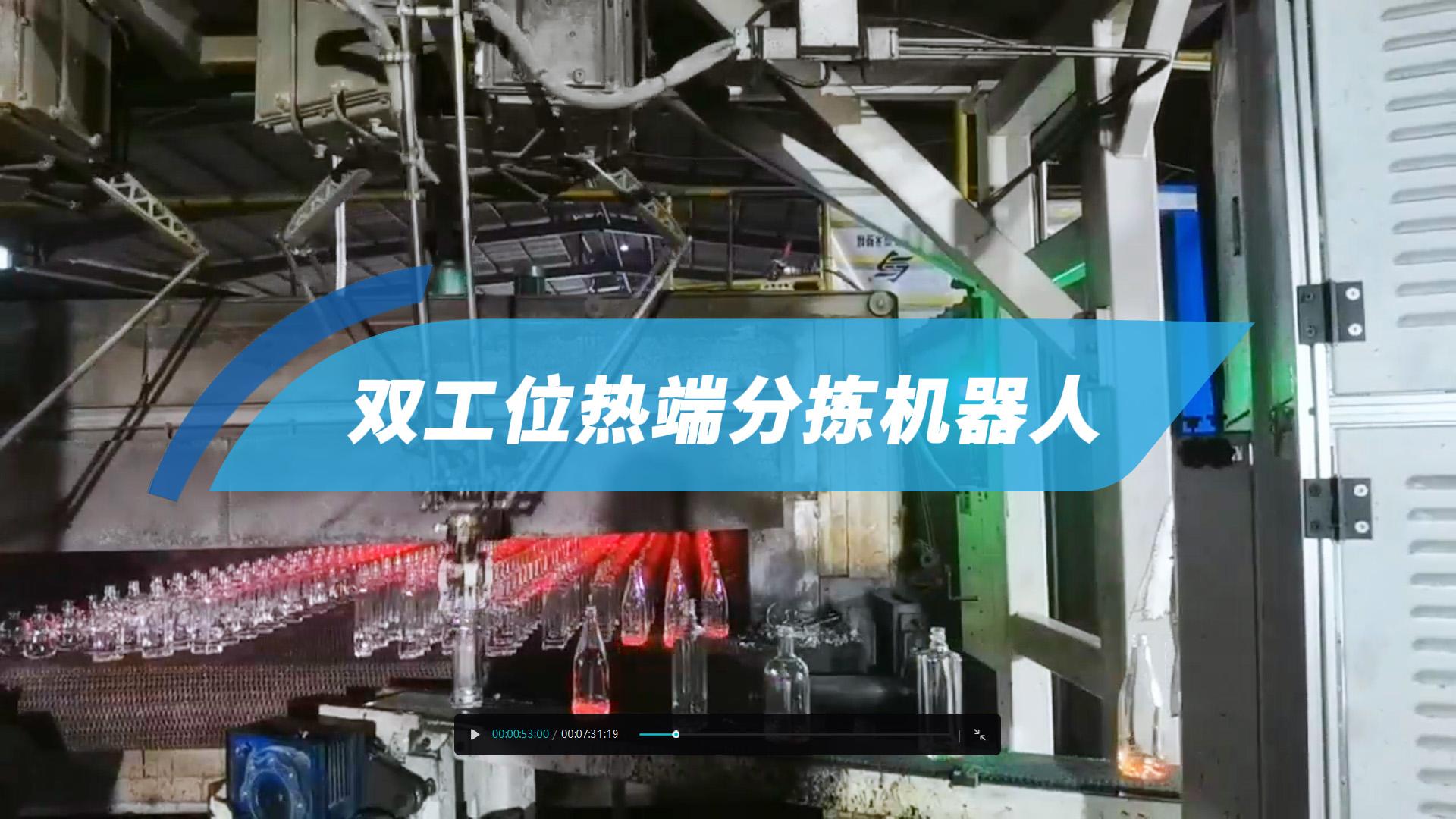
Logra un proceso automatizado de clasificación y transporte de materias primas no clasificadas mediante la colaboración entre un robot de pórtico y una pinza sensorial. Capaz de procesar envases de múltiples especificaciones en estado no organizado, adaptándose a escenarios complejos de alimentación de materiales.