English
简体中文
English
Español
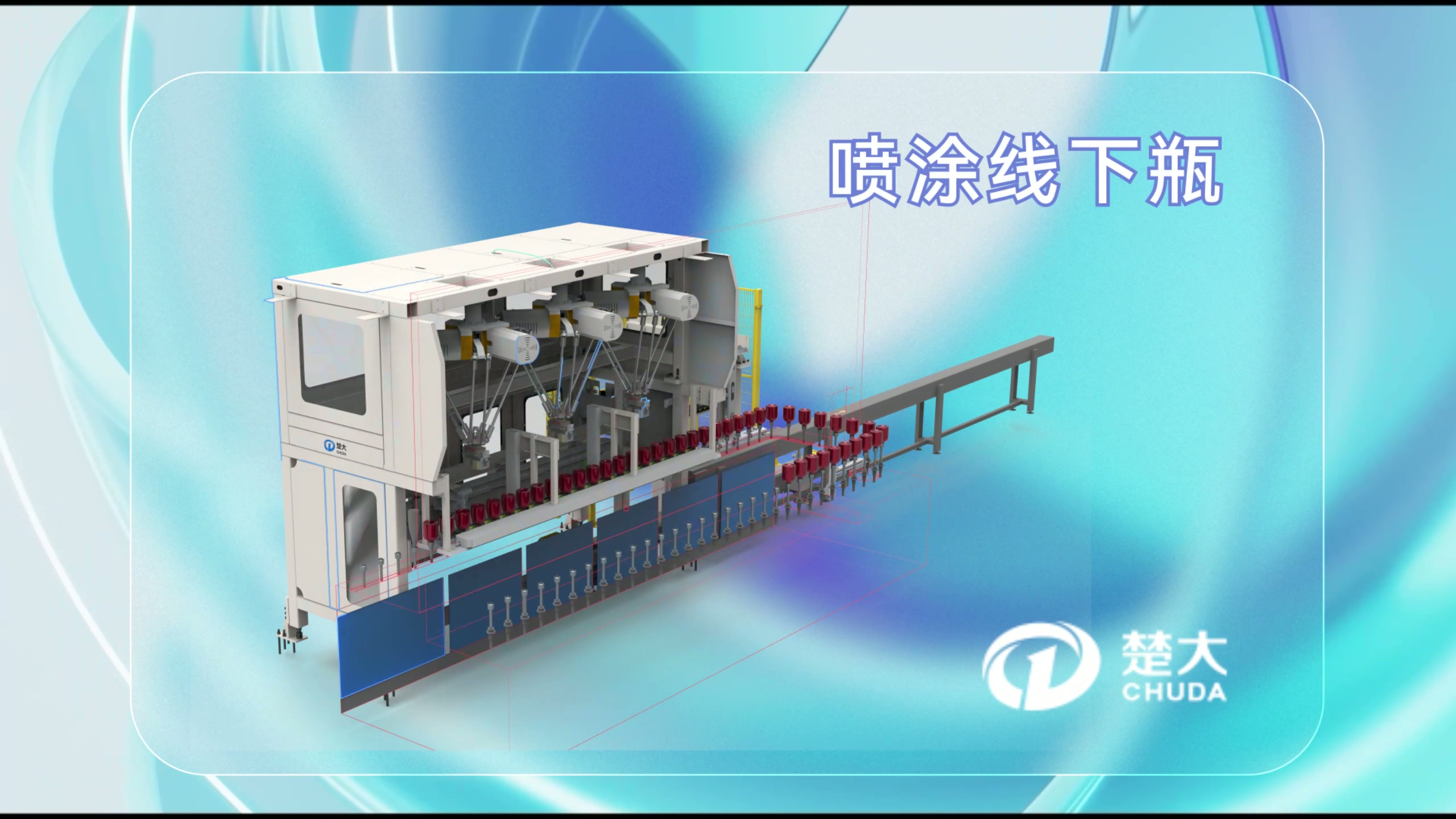
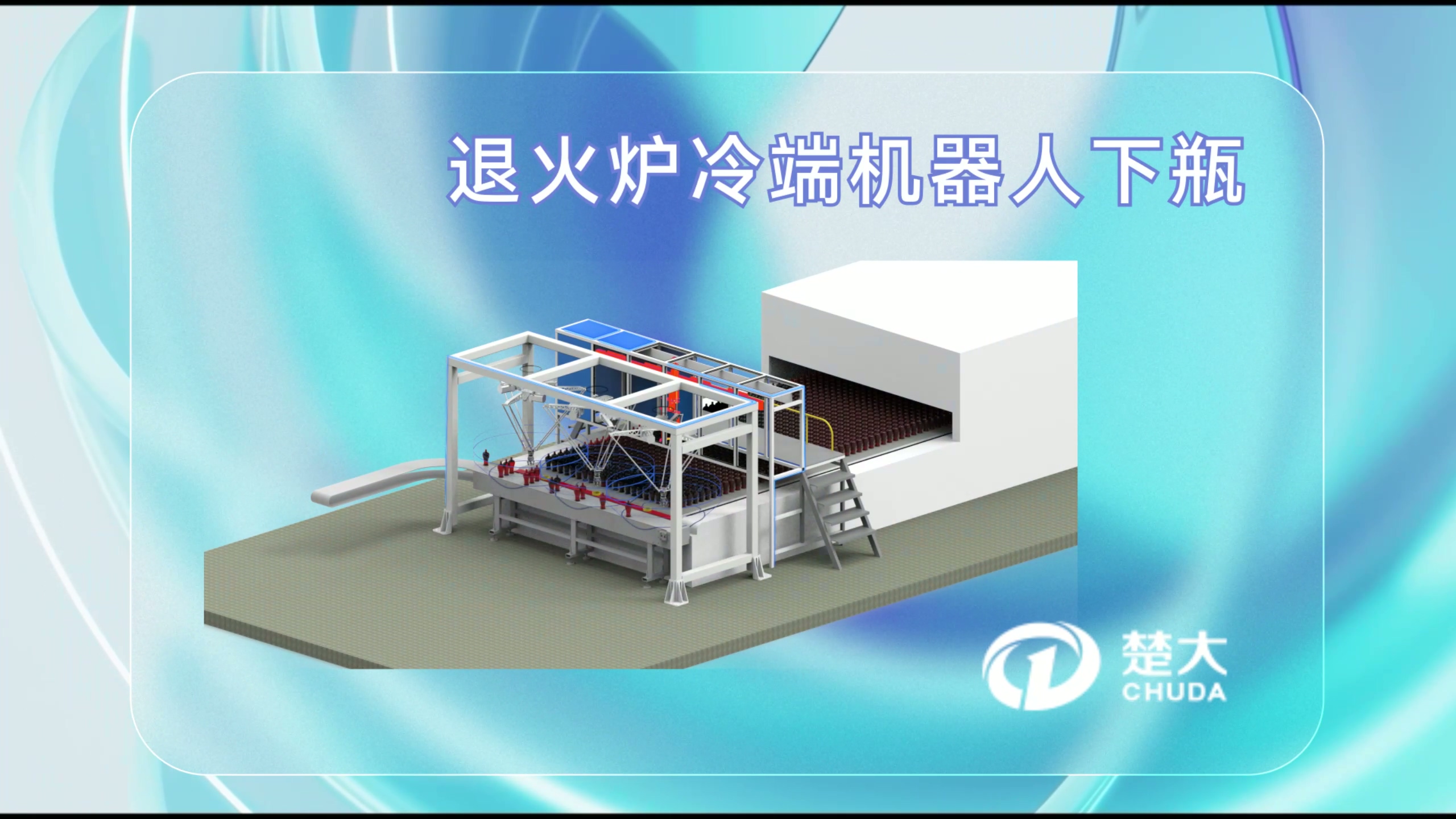
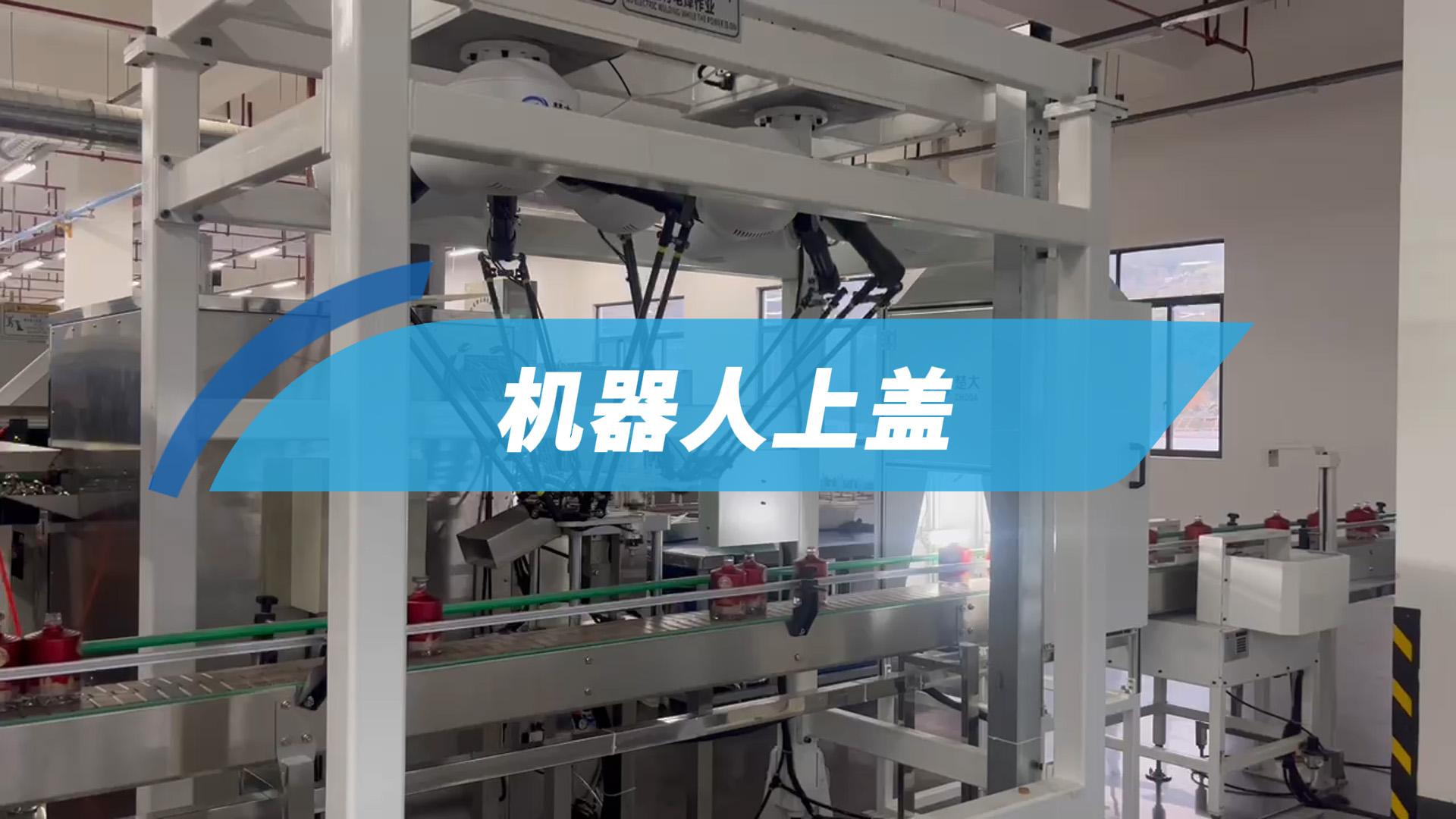
The process flow of fully automatic grabbing, handling, and transfer for capped bottles and jars is achieved through the three-axis gantry robotic arms combined with a pneumatic gripper cluster system. The high-speed movement of the three-axis gantry integrates with pneumatic gripping, while the flexible design of the pneumatic gripper cluster adapts to various bottle types, ensuring grabbing stability.