English
简体中文
English
Español
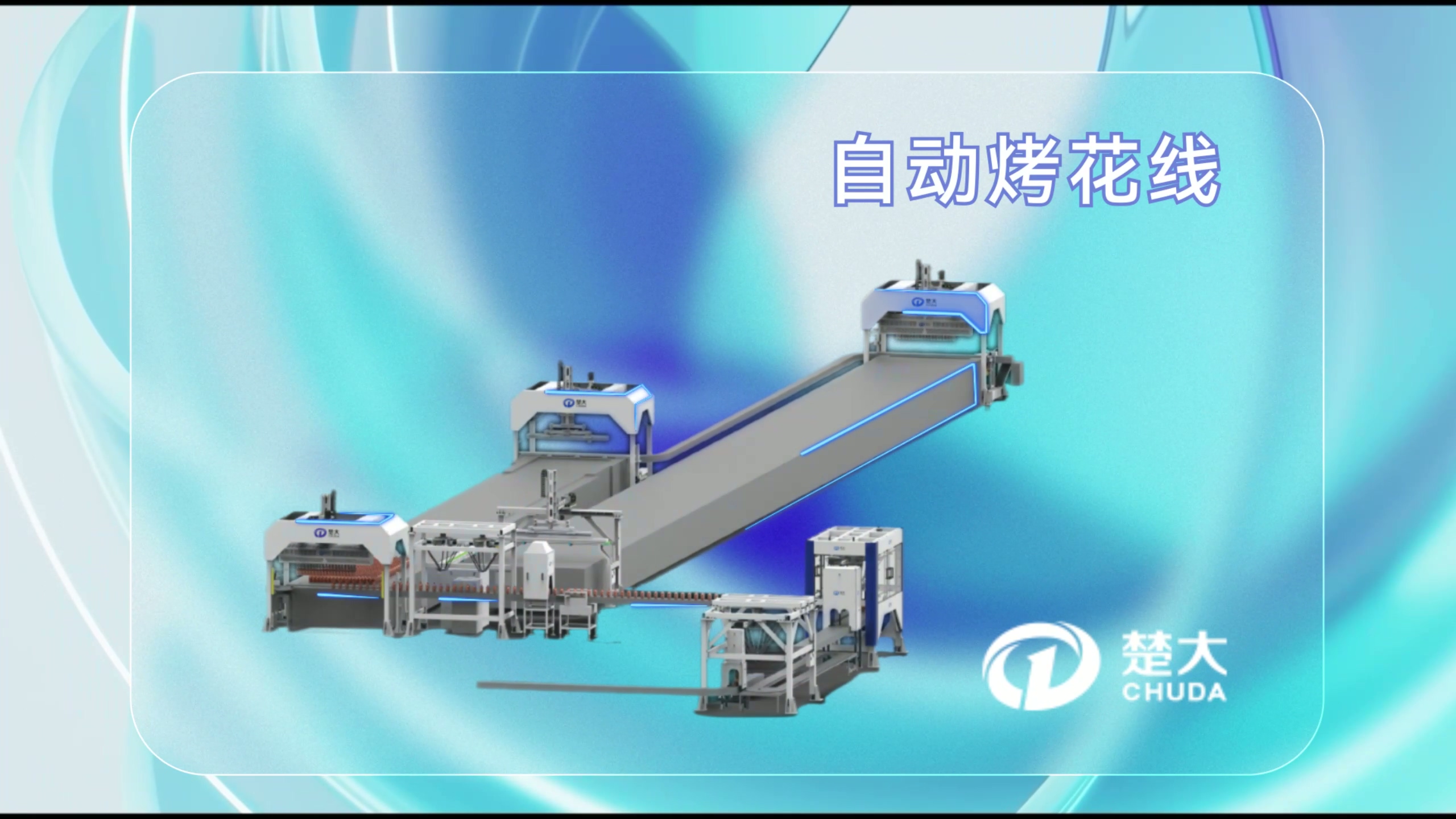
Modular design, tailor-made for deep processing applications, enabling automatic capping/uncapping and loading/unloading in the deep processing of glass bottles and jars.
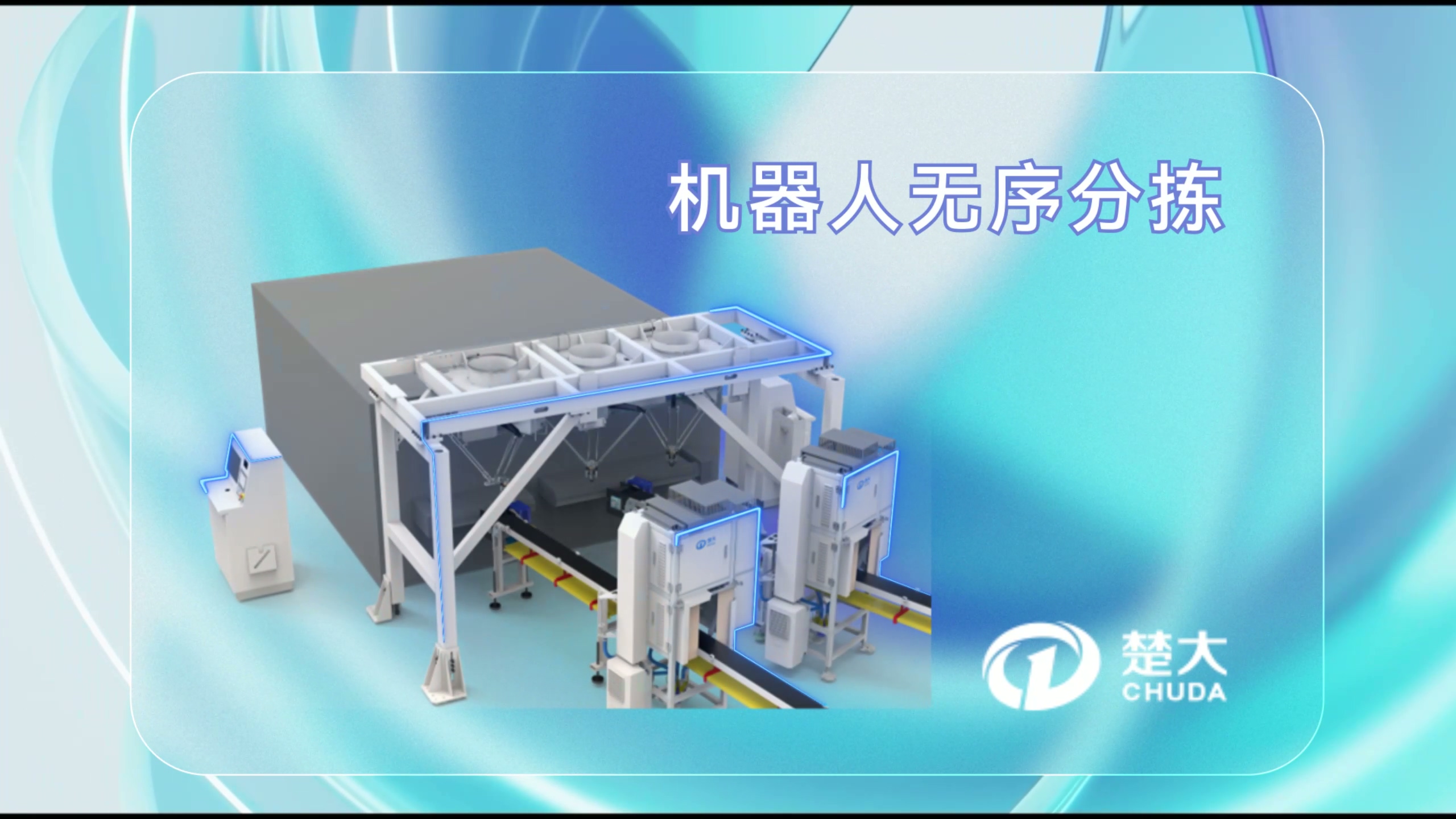
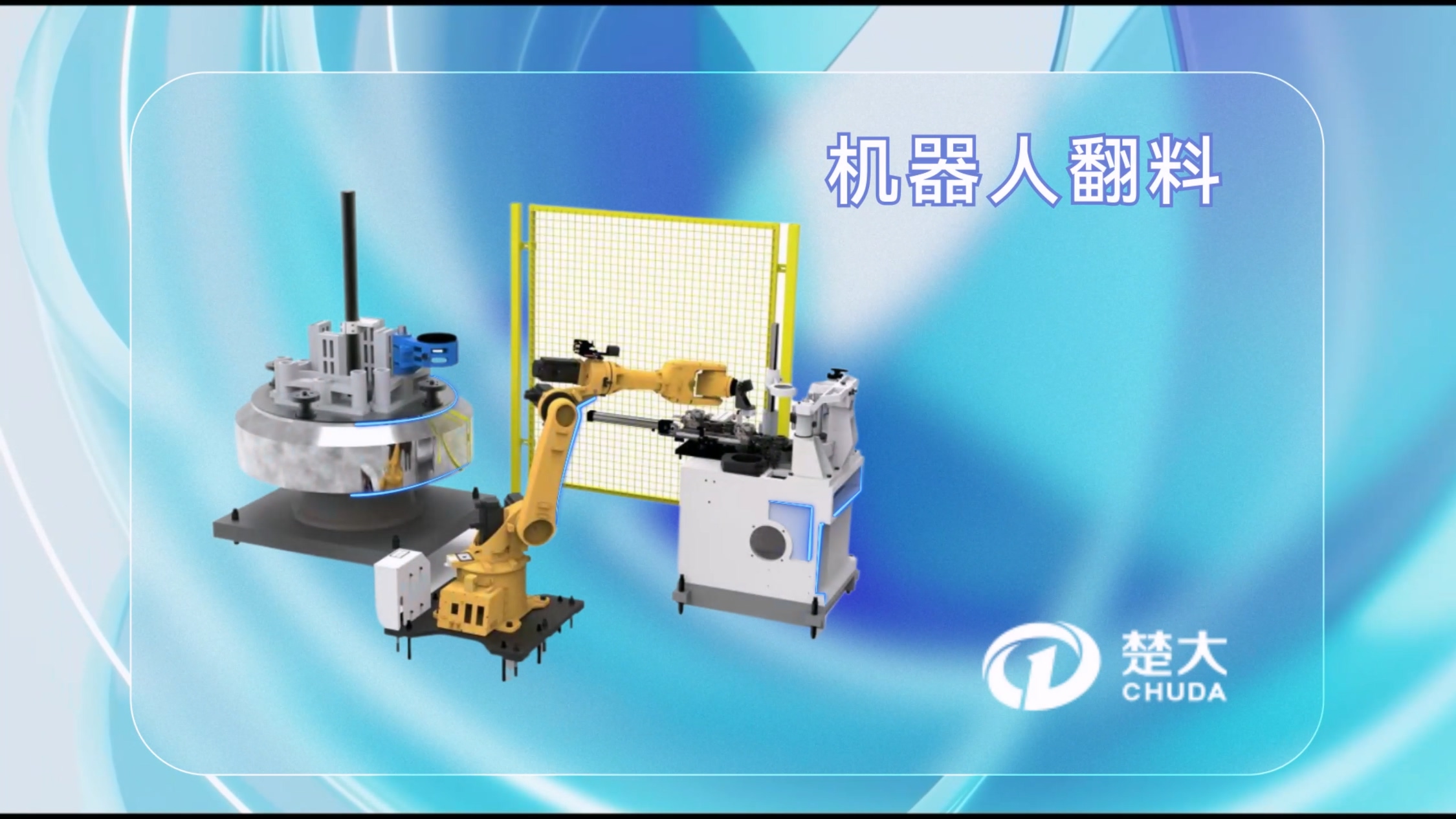
Using advanced vision tech and algorithms, it precisely identifies, grabs and sorts glass containers of various shapes for annealing lehr loading/unloading.
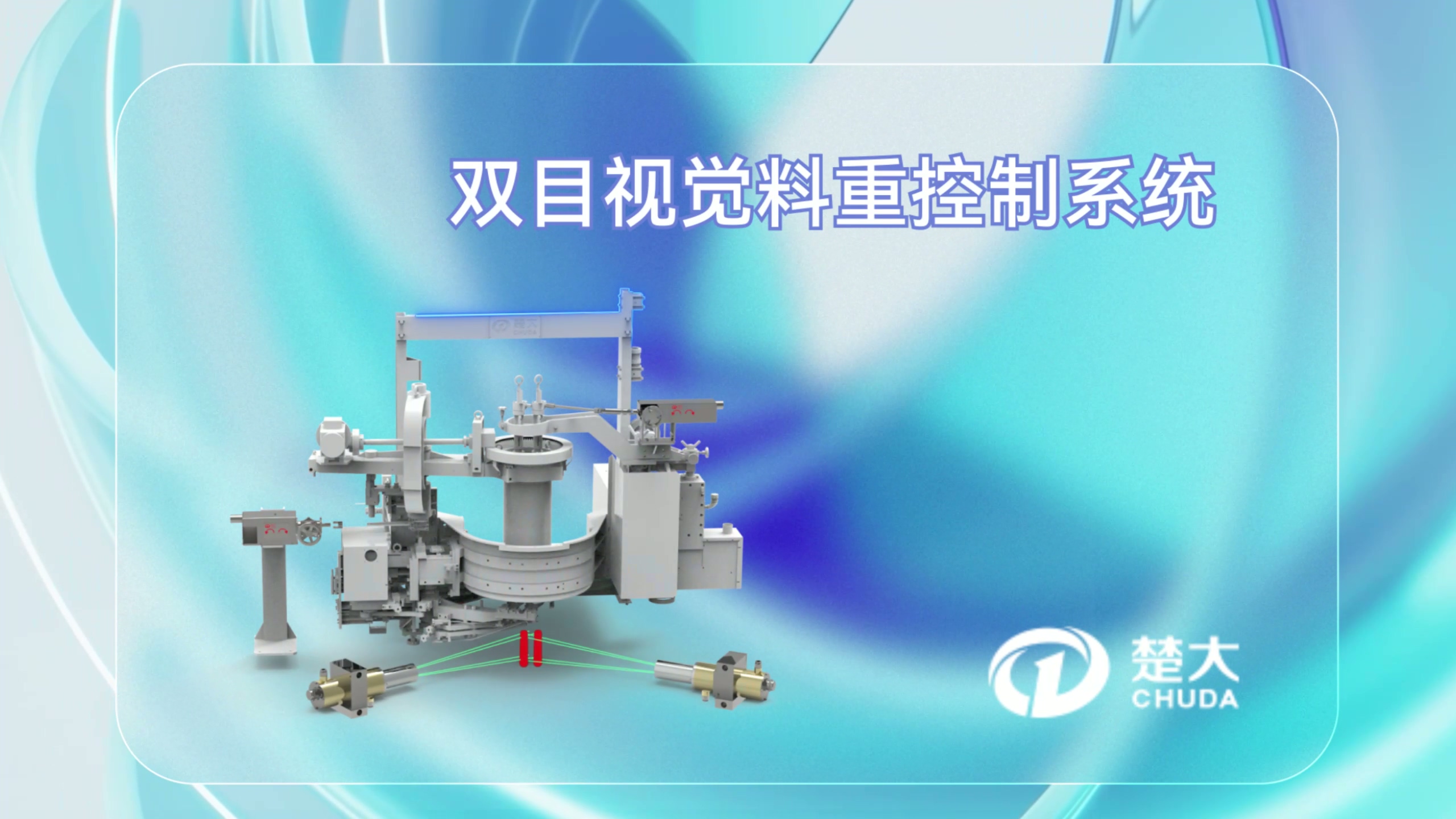
The vision system uses 3D modeling to calculate gob weight, enabling real-time closed-loop control for uniform gob formation.
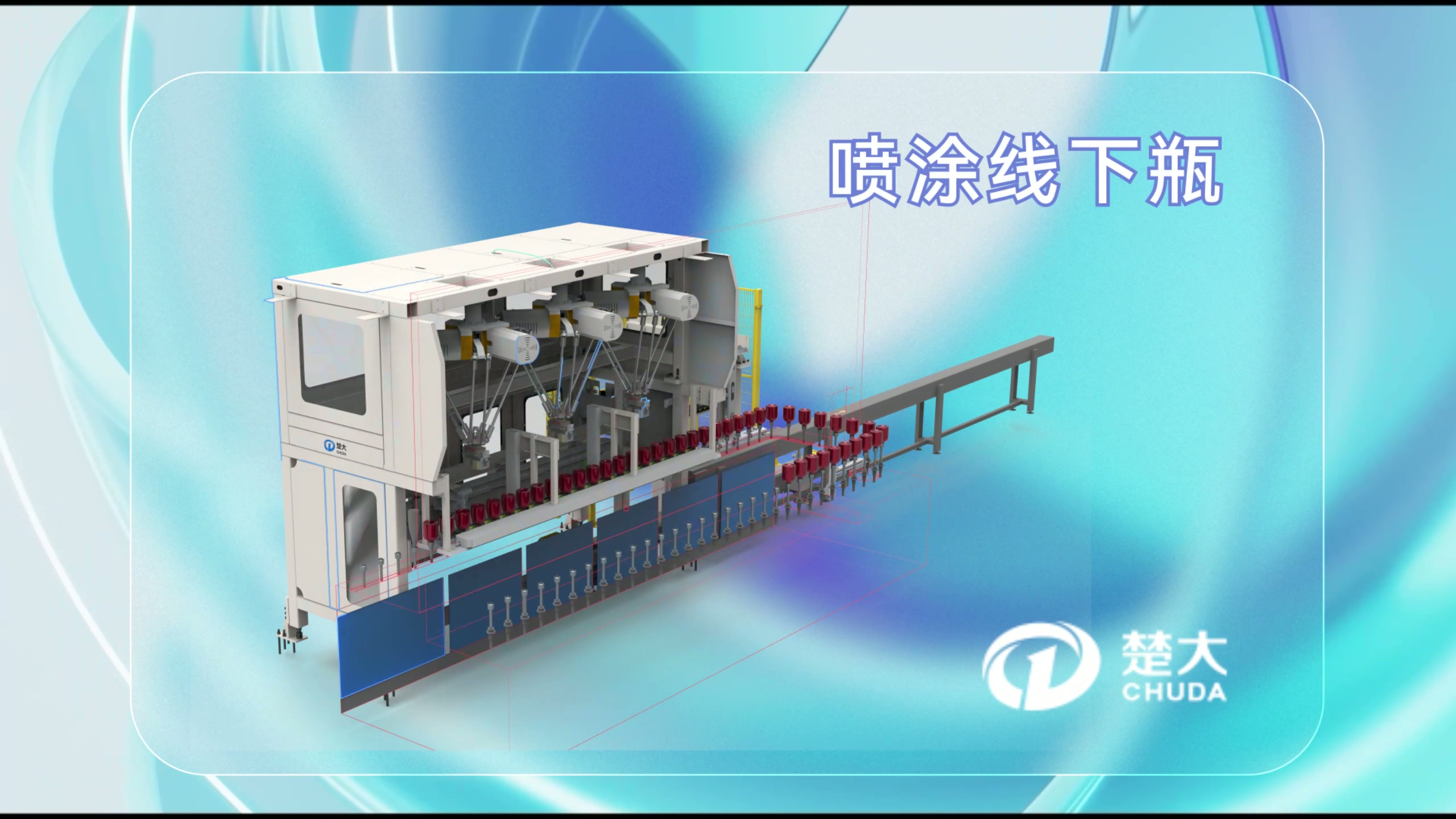
Leveraging robots for efficient bottle unloading in glass bottle spraying lines, gantry grippers replace manual labor to transport glass bottles to the conveyor line.
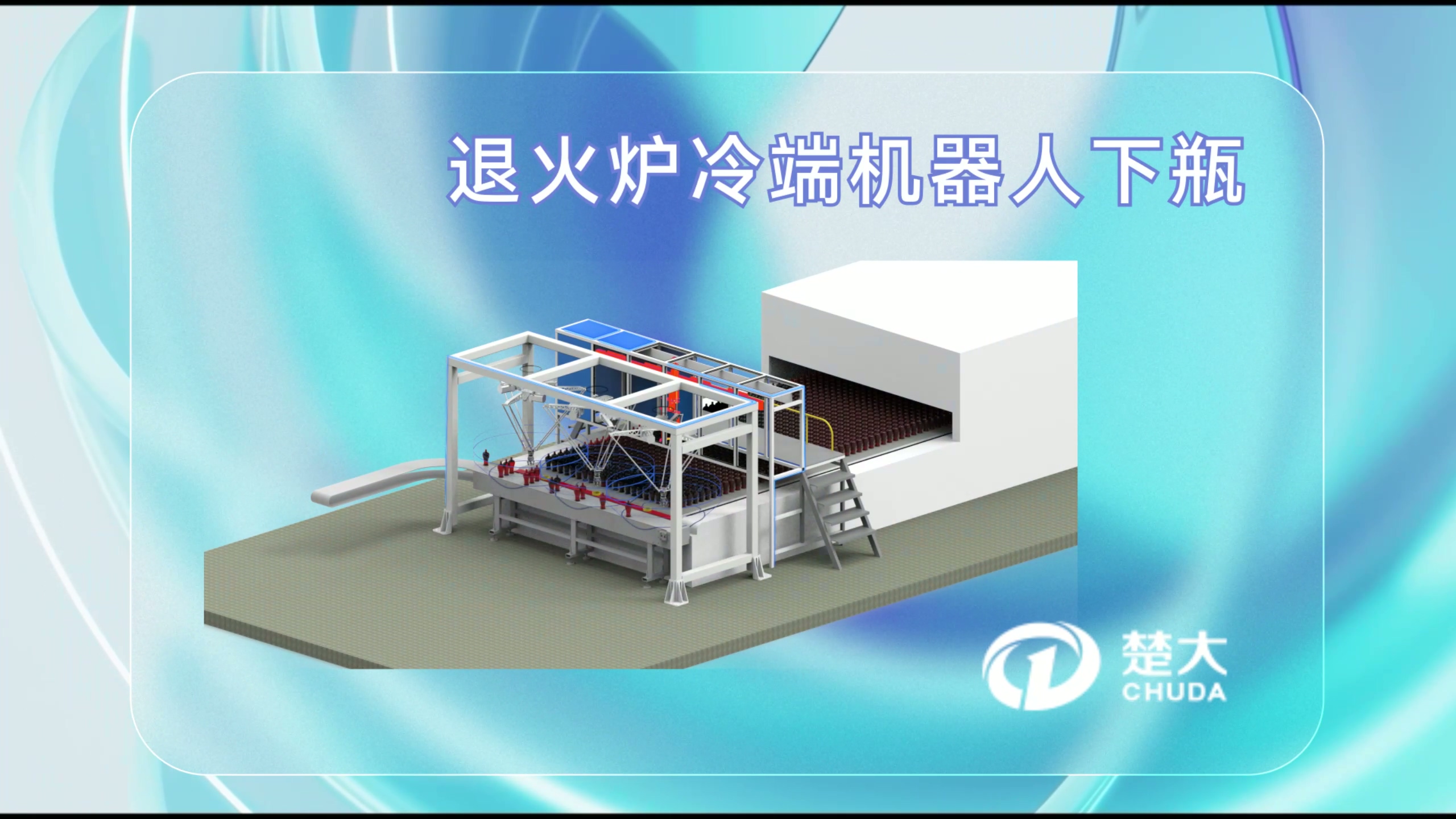
It replaces manual labor by automatically transporting bottles from the lehr to the conveyor, with adaptable setups for different unloading operations.
An efficient and flexible solution uses precision robots to transfer parisons to blow molds, enabling the automated production of ringless glass bottles.

With visual-mechanical integration enabling high-speed dynamic gripping, it meets intelligent post-annealing sorting needs for continuous glass production.

Robot-pneumatic gripper clusters enable fully automated spraying/transfer—no manual work in the process, improving line efficiency and product consistency.
Gantry robot breaks manual safety & efficiency limits in production environments.


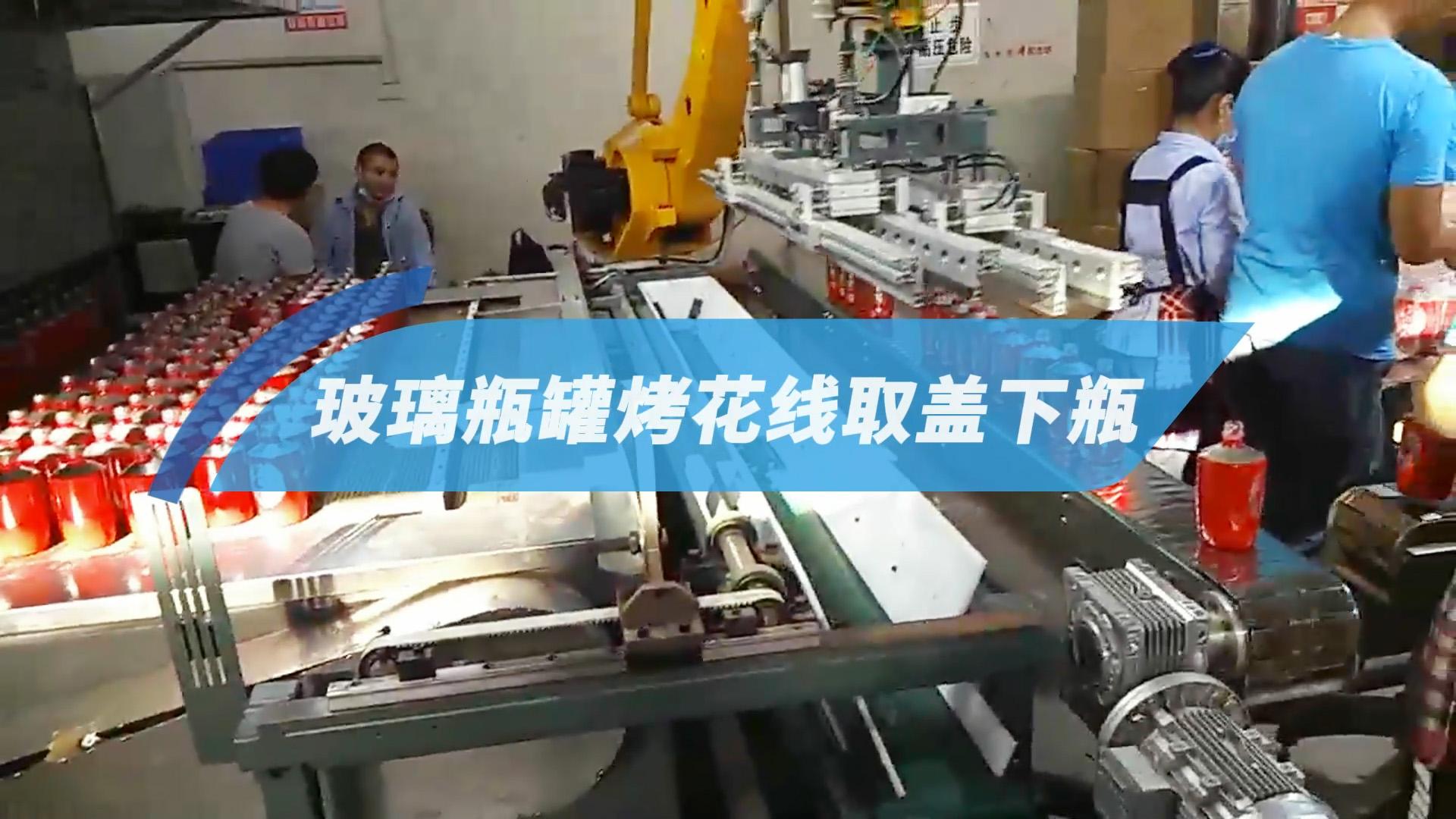
The integrated system enables automatic bottle cap removal and recycling.

The process flow of fully automatic grabbing, handling, and transfer for capped bottles and jars is achieved through the three-axis gantry robotic arms combined with a pneumatic gripper cluster system. The high-speed movement of the three-axis gantry integrates with pneumatic gripping, while the flexible design of the pneumatic gripper cluster adapts to various bottle types, ensuring grabbing stability.