Русский
简体中文
English
Español
Русский
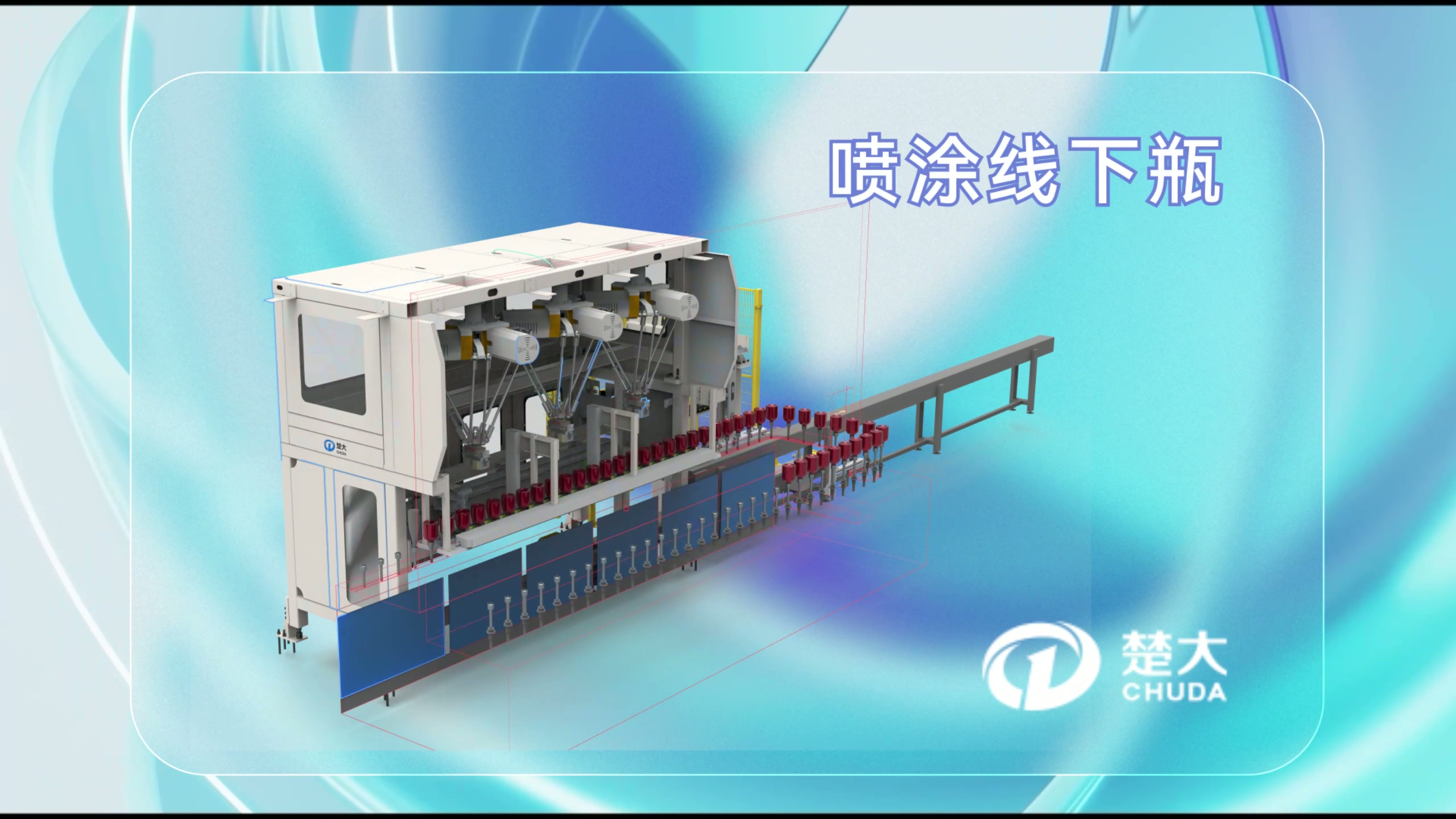
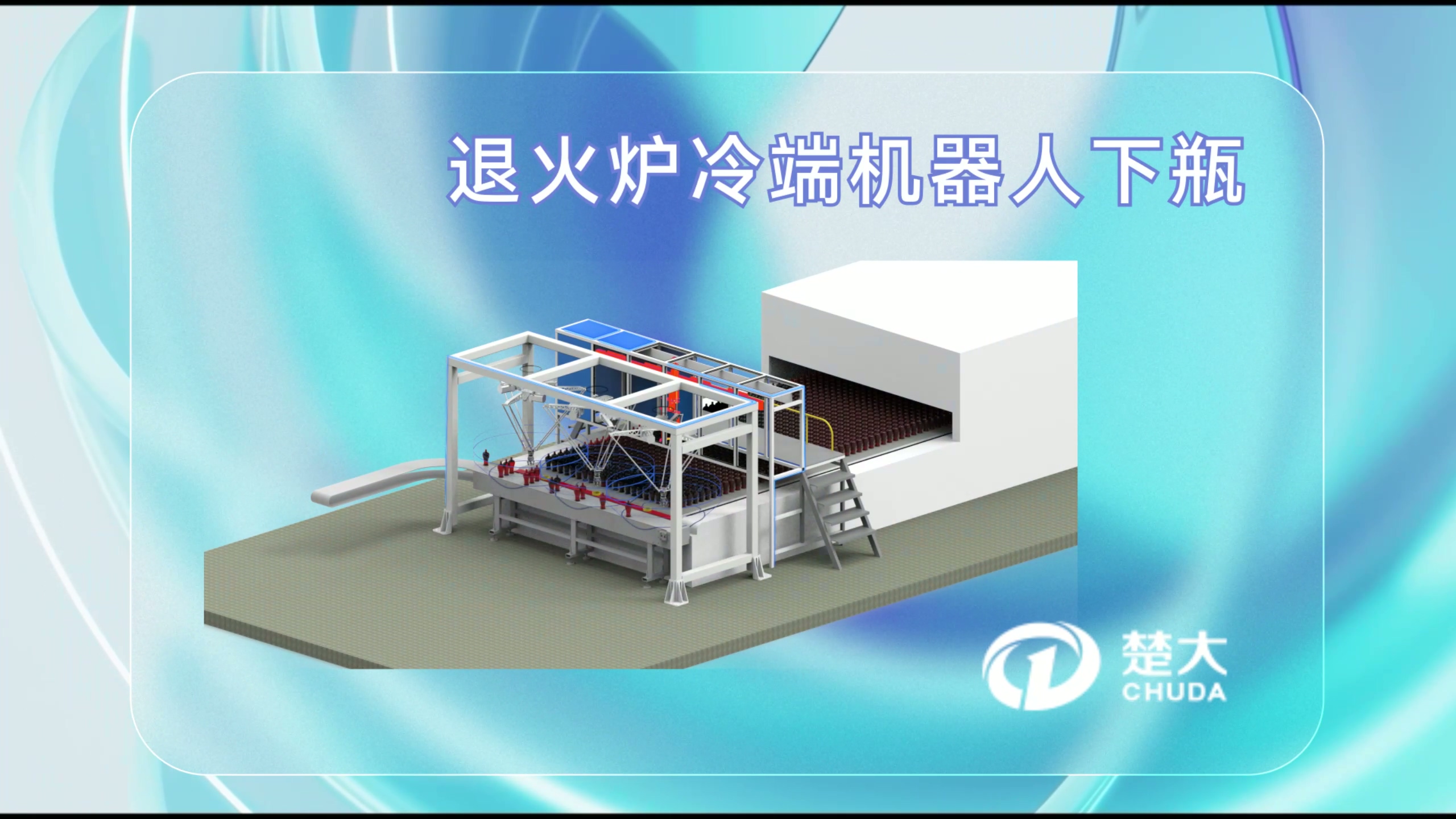
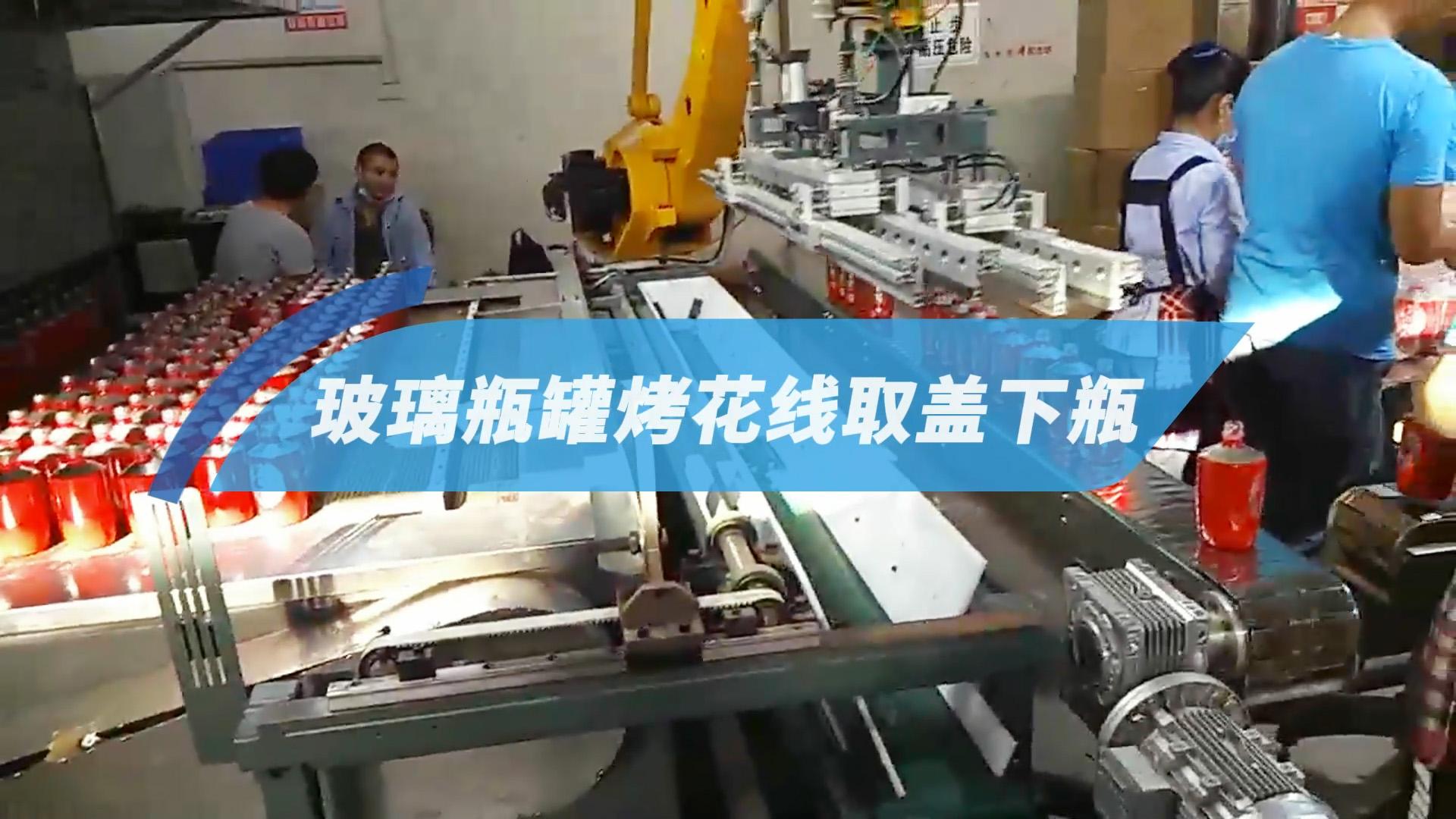
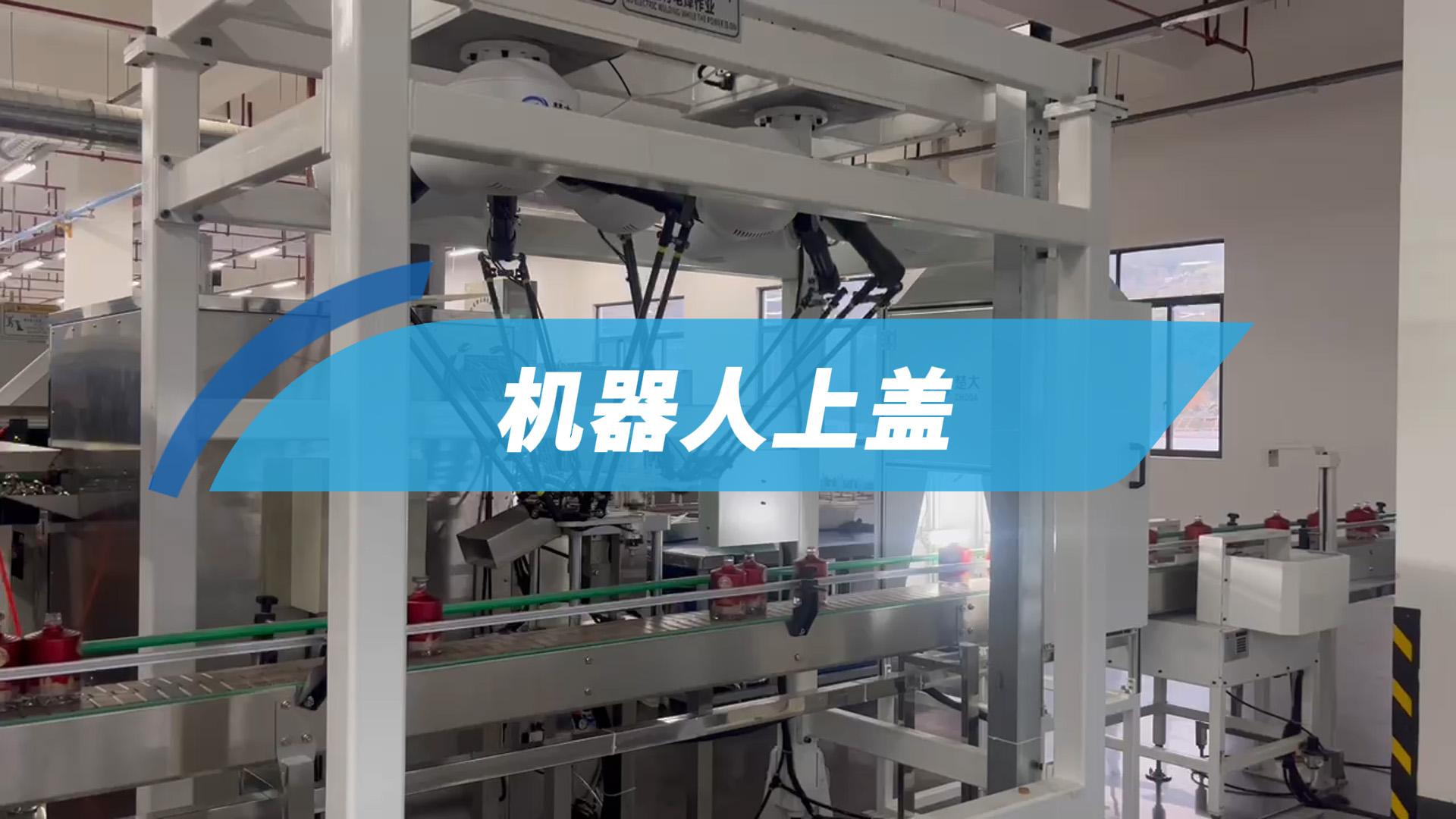
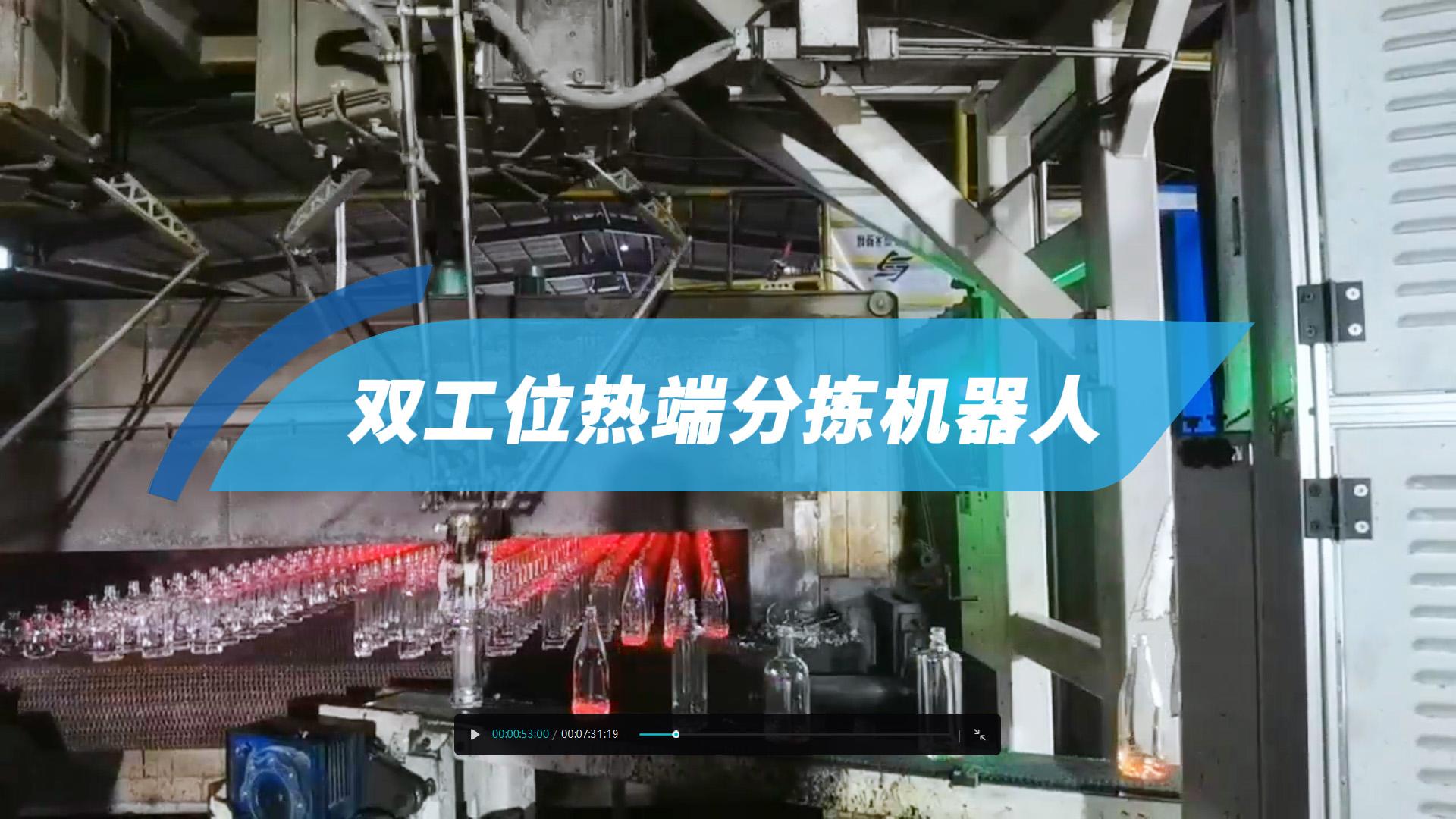
Система робота с портальным рядным захватом осуществляют автомотическое снятие защитной пробки , разгрузка бутылоки и операция перемещения,преодоление ограничения безопасности и эффективности ручных операций в условиях высоких температур, проектирование портальных захватов адаптируется к форме бутылок, обеспечивает точность извлекателя и размещения, повышет общую эффективность работы линии декарации.