Русский
简体中文
English
Español
Русский
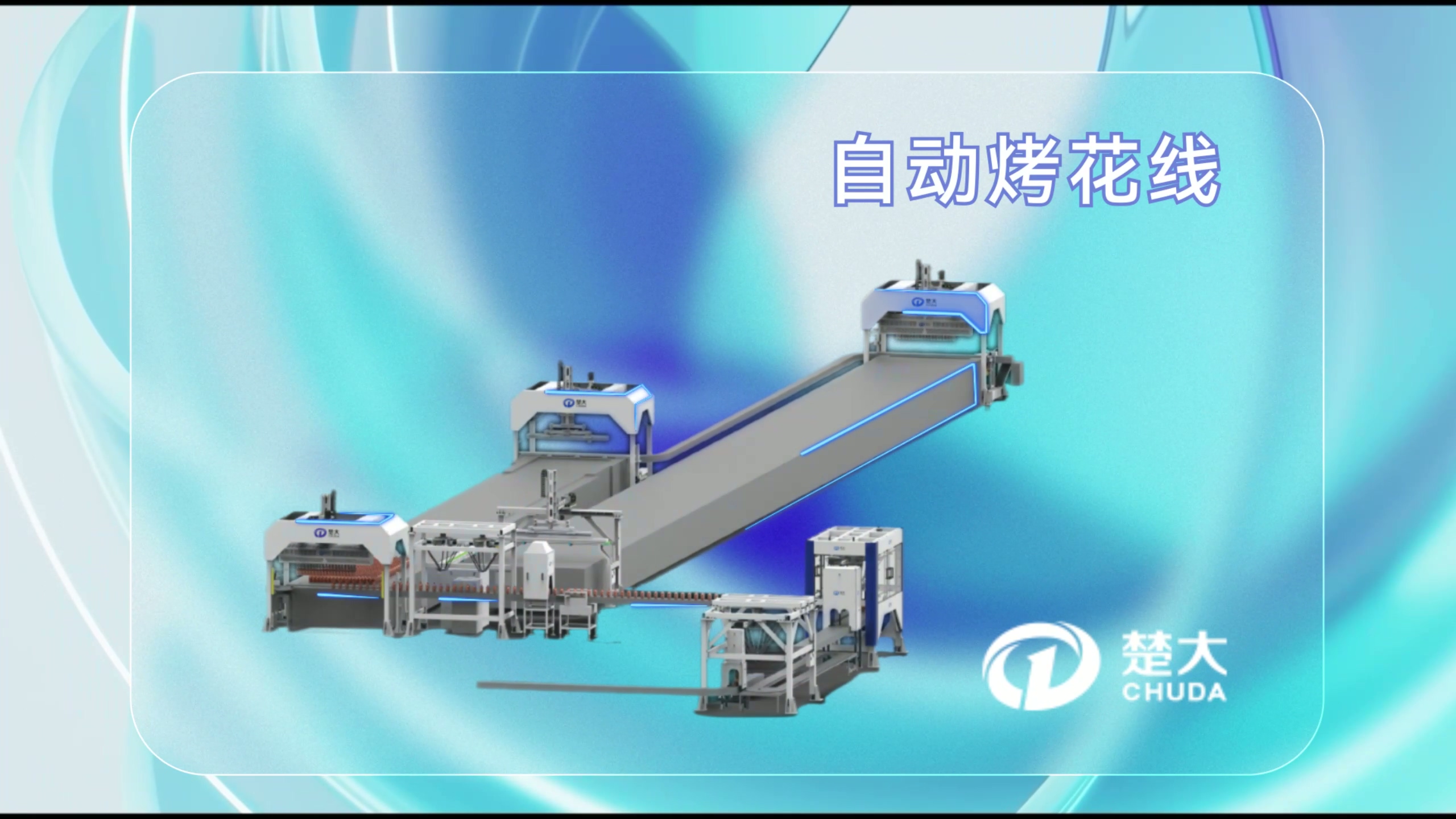
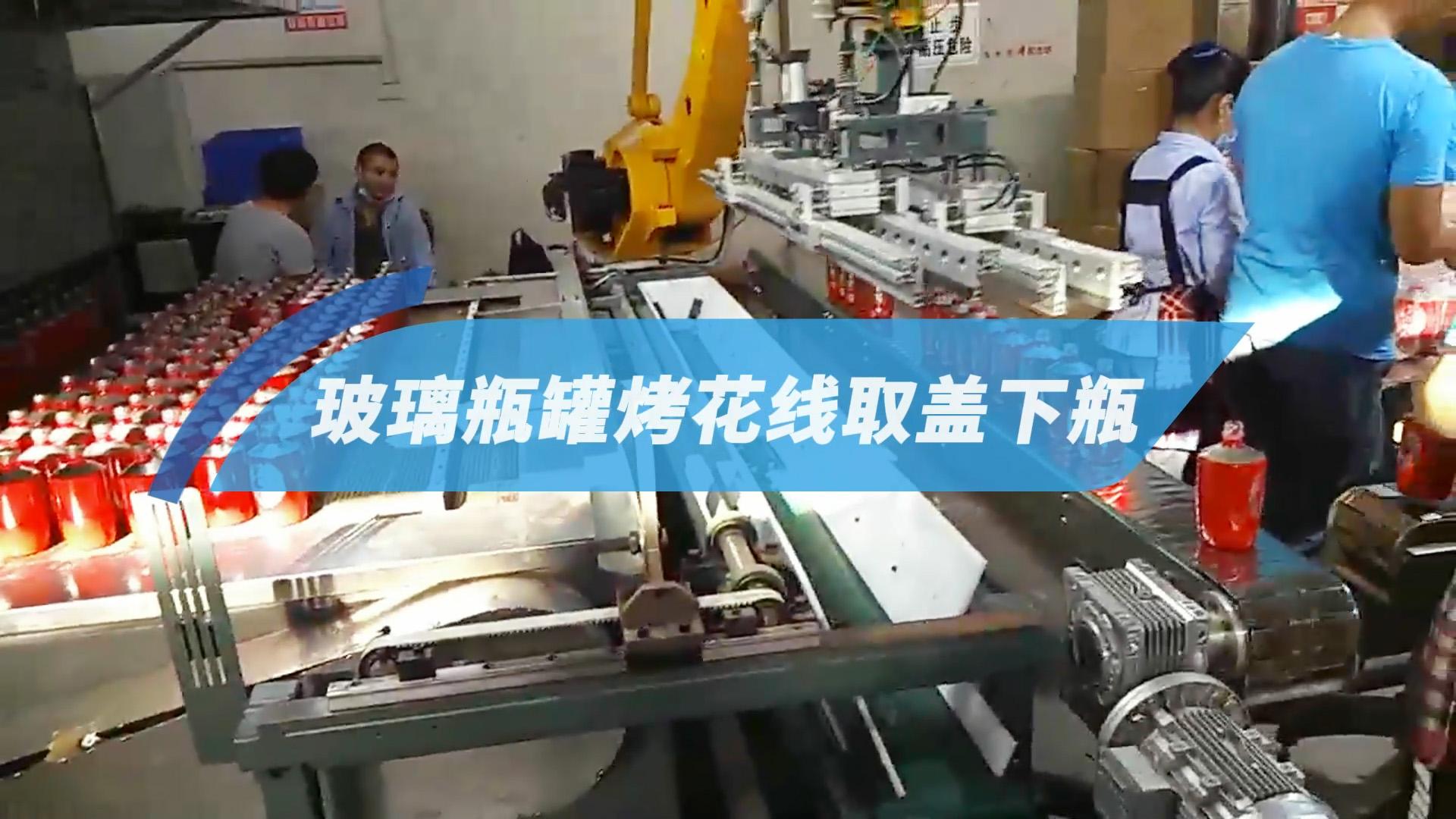
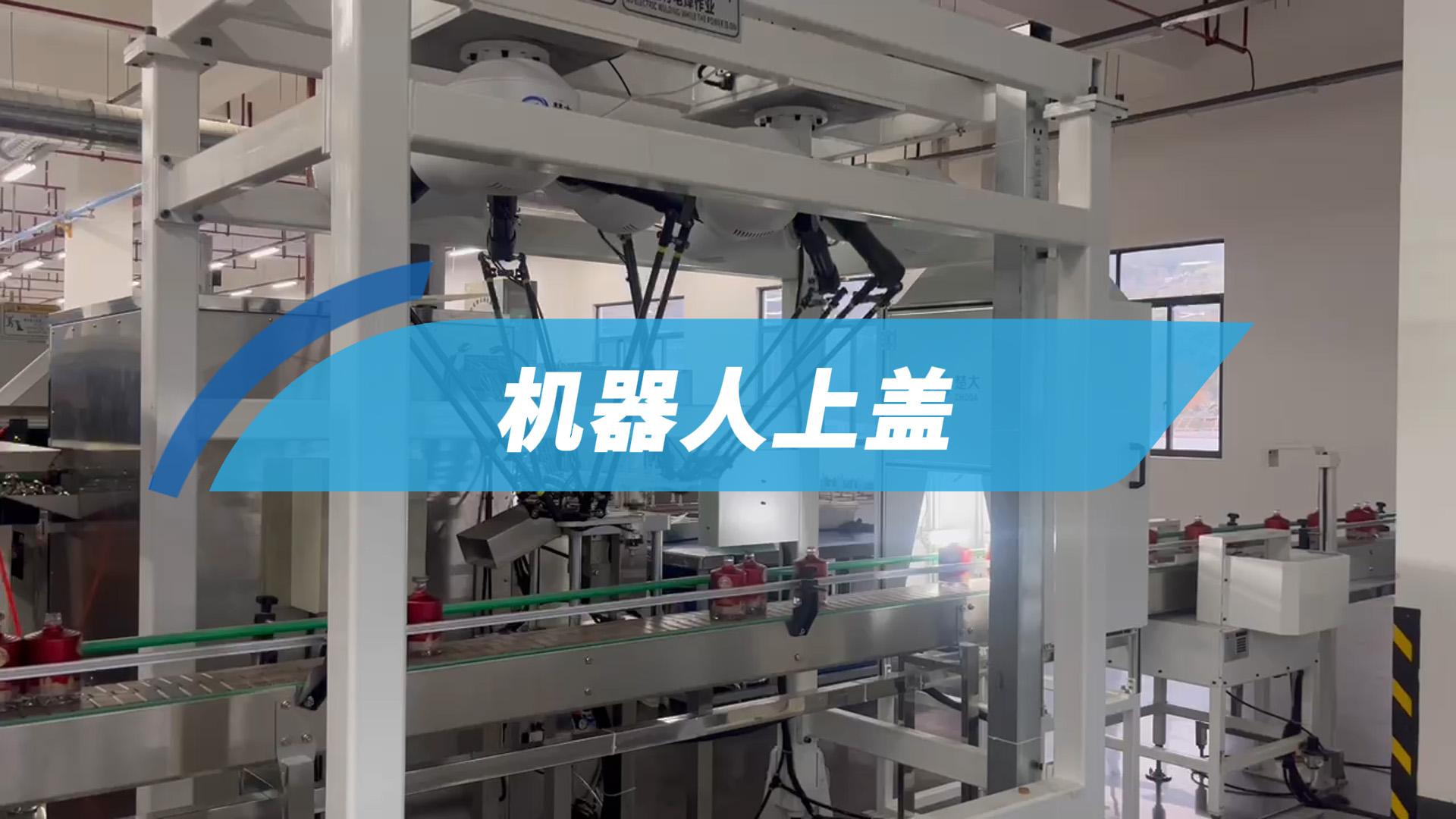
С помощью трехосного портального механического манипулятора и системы пневматического рядного захвата реализуется технологический процесс автоматического захвата, перемещения и операции преобразования последовательности бутылок и банок с защитной пробкой. Высокоскоростное перемещение трехосной портальной конструкции сочетается с пневматическим зажимом, а гибкая конструкция пневматического рядного захвата адаптируется к различному типу бутылок, чтобы обеспечить стабильность захватывания.